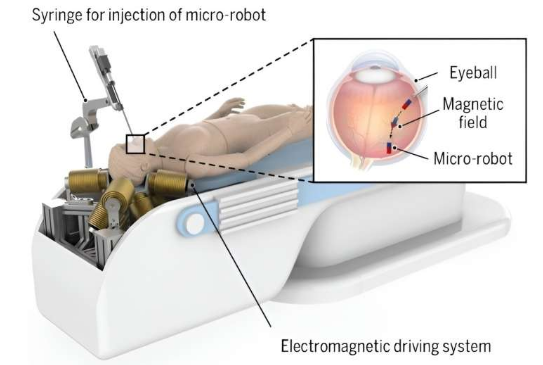
研究团队提出了一种新型电磁驱动系统,该系统由八个优化的电磁铁组成,以最佳配置排列,并采用基于主动抗扰控制器 (ADRC) 和虚拟边界的控制框架。电磁驱动系统被提出用于眼后部微型机器人的灵活 5 自由度磁纵,从而实现精准的靶向药物输送。
该团队于 2024 年 3 月 23 日在《Cyborg and Bionic Systems》上发表了他们的研究成果。
眼内显微手术已从使用传统手持手术工具转变为采用机器人辅助手术,因为它能够有效减轻外科医生在手术过程中的生理震颤并实现精确的运动缩放。
然而,随着手术距离眼后部越来越近,机器人辅助设备可能会不小心将器械放置得太深,或在外科医生的控制下施加过大的巩膜力,从而损伤视网膜或巩膜,导致出血甚至严重损伤。上述原因导致术中和术后并发症的发生率为2%至30%。
这些 5 自由度电磁驱动系统与现有的机器人辅助系统相比,具有独特的驱动范式。它通常采用力控制模式,而不是位置控制模式,这使得微型机器人成为一种更安全的眼后部交互工具。
在力控制模式下,电磁驱动系统可通过限制相互作用力来有效降低造成不可修复的视网膜损伤的风险,即使在患者移动或系统故障的情况下也是如此。然而,在大型工作空间内产生高强度磁场和磁力是一项挑战。