一组研究人员开发了一种使用深度强化学习控制下肢外骨骼的新方法。发表在《神经工程与康复杂志》上的题为“通过深度强化学习结合肌肉骨骼模型对下肢康复外骨骼进行稳健步行控制”的方法可为下肢外骨骼用户提供更稳健、更自然的步行控制。
虽然可穿戴机器人技术的进步有助于恢复下肢损伤的人的活动能力,但目前的外骨骼控制方法在为用户提供自然和直观运动的能力方面受到限制。这会损害平衡并导致用户疲劳和不适。很少有研究专注于开发可以在安全性和独立性方面优化用户体验的稳健控制器。
据合著者 Ghaith Androwis 博士称,用于下肢康复的现有外骨骼采用多种技术来帮助用户保持平衡,包括特殊的拐杖和传感器。凯斯勒基金会和中心康复机器人与研究实验室主任。没有这些助手的外骨骼允许更多的独立行走,但以增加重量和缓慢行走速度为代价。
“先进的控制系统对于开发下肢外骨骼至关重要,这种外骨骼能够在一系列条件下自主、独立行走,”Androwis 博士说。研究团队开发的新方法使用深度强化学习来改善外骨骼控制。强化学习是一种人工智能,它使机器能够通过反复试验从自己的经验中学习。
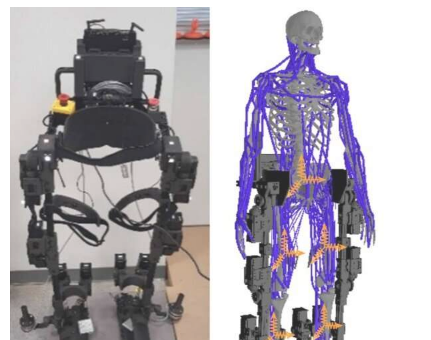
“使用与外骨骼相结合的肌肉骨骼模型,我们模拟了下肢的运动,并训练外骨骼控制系统使用强化学习实现自然行走模式,”通讯作者周先连博士解释说,他是该研究所副教授兼主任。新泽西理工学院 (NJIT) 生物医学工程系的生物动力学实验室。“我们正在使用我们团队正在开发的下肢外骨骼在真实条件下测试该系统,结果显示了提高行走稳定性和减少用户疲劳的潜力。”
该团队确定,他们提出的模型生成了一个通用的鲁棒步行控制器,能够处理各种级别的人外骨骼交互,而无需调整参数。新系统有可能使广泛的用户受益,包括那些患有脊髓损伤、多发性硬化症、中风和其他神经系统疾病的用户。研究人员计划继续与用户一起测试该系统,并进一步完善控制算法以提高步行性能。